Xã hội ngày càng phát triển, và các sản phẩm công nghệ 4.0 ngày càng xuất hiện nhiều trên thị trường và nam châm bay lơ lửng là một trong những công nghệ được nhiều người ưa thích hiện nay về tính thẩm mỹ của sản phẩm, nam châm bay này có rất nhiều ứng dụng trong đời sống nhưng để chế tạo nam châm bay lơ lửng này thì phải làm sao, ở bài viết này tôi sẽ hướng dẫn các bạn
Nam châm bay lơ lửng chế tạo ra sao ?
1 Mua linh kiện nam châm bay
Hiện tại linh kiện nam châm bay thì tìm khá khó, ít nơi bán, thì đây là nơi tốt nhất để bạn có thể mua linh kiện giá linh kiện bên mình rơi vào tầm khoảng 500k ~ 1tr , rất phù hợp cho sinh viên hoặc những ai muốn nghiên cứu phát triển sản phẩm nam châm bay
Liên hệ website để mua linh kiện nhé
2 Mua sản phẩm nam châm bay
Nếu bạn không muốn tự mình lắp ráp thì có thể mua toàn bộ sản phẩm để sử dụng, thì trường hợp này bạn không tốn thời gian cho việc chế tạo mà chỉ tốn thời gian cho việc lắp ráp
Nam châm bay lơ lửng thì có nhiều mức giá tầm 2tr ~45tr tùy vào khả năng chịu tải của từng thiết bị

+ Khả năng chịu tải 500g có giá 2.800.000 VND
+ Khả năng chịu tải 1kg có giá 4.700.000 VND
+ Khả năng chịu tải 2kg có giá 10.700.000 VND
+ Khả năng chịu tải 4kg có giá 47.000.000 VND
*Chú ý: Đối với sản phẩm công nghệ thì trên thì trường có rất nhiều chỗ bán, nhưng quan trọng là sản phẩm phải chất lượng, nên bạn không cần phải so sánh giá quá nhiều, vì giá tốt thì chất lượng tốt mà thôi
Nếu bạn mua những sản phẩm giá rẻ trên thị trường thì cũng có lúc sẽ sử dụng không được bền, làm chúng ta tốn công sức lắp ráp sản phẩm
3. Ứng dụng của Nam châm bay
Nam châm bay đầu tiên là xuất hiện ở thị trường Nhật Bản với các ứng dụng về mặt thẩm mỹ cho người dùng, và được nhiều người cảm thấy thích thú đối với một công nghệ mới như thế này
a) Ứng dụng về chế tạo bonsai bay lơ lửng
Dưới đây là một số hình ảnh về chế tạo bonsai

b) Ứng dụng trong việc trưng bày sản phẩm

4. Chế tạo nam châm bay lơ lửng như thế nào
A. Nguyên lý hoạt động của nam châm bay lơ lửng
Muốn chế tạo được một cái gì đó, thì việc đầu tiên chúng ta cùng làm là phải hiểu được nguyên lý hoạt động của vật thể đó như thế nào

+ Cấu tạo của một nam châm bay ( Hay còn gọi là điệm từ trường )
Cấu tạo của một nam châm bay bao gồm phần đế và khung lơ lửng
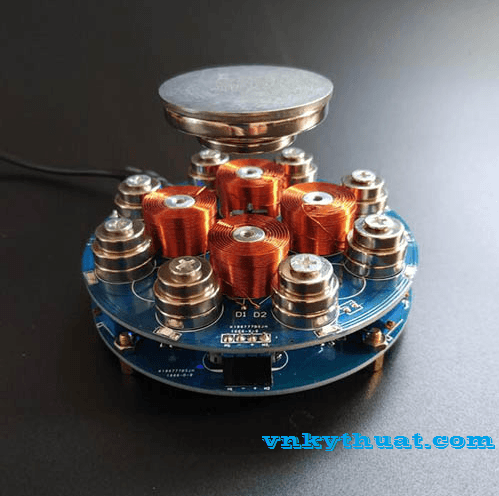
Phần đế :

Hình trên là phần đế của điệm từ trường ( nam châm bay) , như hình thì chúng ta cần quan tâm là 2 thành phần , Một là nam châm vĩnh cửu tạo ra từ trường, Hai là nam châm điện dùng để điều khiển từ trường , 2 cái này phải luân phiên điều khiển thì mới tạo ra từ trường vững được
Từ ngày xưa, khi học ở trung học thì chúng ta cũng biết rằng, 1 nam châm thì có 2 cực bắc và nam, cùng cực thì húng sẽ đẩy nhau, khác cực thì sẽ hút nhau
Nếu lắp 4 nam châm vĩnh cửu ở 4 góc thì chúng sẽ tạo chung một lực đẩy ở tâm hình vuông
Để tạo ra được từ trường vững thì bắc buộc phải có điều khiển bằng cảm biến từ và các mạch điều khiển thì 4 nam châm điện cũng được đặt ở 4 góc, nhưng chú ý rằng, 2 nam châm điện đối xứng nhau phải đối cực như hình bên dưới

Phần lơ lửng
Gồm một nam châm vĩnh cửu được đặt trên đó, đảm bảo cho từ trường ổn định và phần lơ lửng có thể bay

+ Nguyên lý hoạt động
Nguyên lý hoạt động là do 4 nam châm vĩnh cữu ở phẩn đế cùng cực với nam châm vĩnh cửu ở phần lơ lửng tạo ra lực đẩy giúp nam châm bay lơ lửng
Nhưng nam châm vĩnh cửu ở phần lơ lửng thì luôn có xu hướng quay lại cho đối cực để hút nhau
Do vậy, phải có thêm nam châm điện và bộ điều khiển ( Điều khiển PID ) tạo thêm lực hút hoặc đẩy để giữ cho nam châm vĩnh cửu ở phần lơ lửng không quay lại được.
Điều khiển PID cực kỳ quan trọng đối với chế tạo sản phẩm này, nên việc tiếp theo bạn cần phải biết là phải hiểu được điều khiển PID
B. Hiểu rõ điều khiển PID là gì
Bộ điều khiển PID thì chúng ta cứ hiểu nôm na rằng, nó là sai số giữa giá trị thực tế và giá trị đã sét , và bộ điều khiển này sẽ ép sai số đó là nhỏ nhất bằng cách điều chỉnh giá trị đầu vào

Giải thuật tính toán điều khiển PID thì gồm 3 thông số khác biệt nhau :

P Giá trị tỷ lệ xác định tác động của sai số hiện tại
I Giá trị tích phân xác định tác động của tổng các sai số quá khứ
D Giá trị vi phân xác định tác động của tốc độ biến đổi sai số
P Phụ thuộc vào sai số hiện tại
I phụ thuộc vào tích lũy các sai số quá khứ
D dự đoán các sai số tương lai, dựa vào tốc độ thay đổi hiện tại.
Kết quả của PID giúp ta điều khiển tốt vị trí của một thiết bị
Nói chung kiến thức này khá sâu rộng, để hiểu rõ hơn thì chúng ta có thể học qua link sau : Understanding PID control
Kiến thức thì nhiều nhưng trong chế tạo nam châm bay này thì chúng ta cần phải biết rõ 3 yếu tố bên dưới:
- Input : Giá trị thời gian thực hiện tại của cảm biến từ trường, vì nam châm phần lơ lửng luôn không đứng yên, bắt buộc phải cập nhật liên tục để tạo điện từ trường điều chỉnh
- Điểm đặt : Chúng ta phải lấy giá trị lúc tất cả cân bằng nhất làm điểm đặt, và set giá trị đó làm cố định, mội thay đổi duy chuyển phải đựa vào điểm đặt
- Output: Tốc độ điều khiển nam châm điện
C. Chuẩn bị linh kiện cho quá trình chế tạo
- LM324N– 1 Cái

2. Cuộn dây đồng – 4 cái

3. Cảm biến từ SS495a – 2 cái

4. Bộ đổi nguồn DC 12V – 1 Cái
 5. Nam châm vĩnh cữu D15 * 4mm – 8 Cái
5. Nam châm vĩnh cữu D15 * 4mm – 8 Cái
 6. Vòng nam châm D15 * 3mm – 4 cái
6. Vòng nam châm D15 * 3mm – 4 cái
 7. Arduino pro mini – 1 cái
7. Arduino pro mini – 1 cái
 8. Module điều khiển động cơ L298 V2 – 1 cái
8. Module điều khiển động cơ L298 V2 – 1 cái
 9. Đế IC 14 chân – 1 cái
9. Đế IC 14 chân – 1 cái
 10. Nam châm vĩnh cửu D35 * 5mm – 2 cái
10. Nam châm vĩnh cửu D35 * 5mm – 2 cái
 11. Điện trở 5.6K ohm – 2 cái
11. Điện trở 5.6K ohm – 2 cái
 12. Điện trở 180K ohm – 2 cái
12. Điện trở 180K ohm – 2 cái
 13. Điện trở 47K ohm – 2 cái
13. Điện trở 47K ohm – 2 cái
 14. Chiết áp 10K ohm – 2 cái
14. Chiết áp 10K ohm – 2 cái
 15. Tấm nhựa khổ A5 – 1 cái
15. Tấm nhựa khổ A5 – 1 cái
 16. Khung gỗ – 1 cái
16. Khung gỗ – 1 cái
 17. Breadboard – 1 cái
17. Breadboard – 1 cái

18. Vít 3mm – 8 cái
 19. Dây điện kết nối và chì cuộn
19. Dây điện kết nối và chì cuộn

Nếu như bạn chuẩn bị hết tất cả như vậy rất tốn thời gian, hãy liên hệ chúng tôi để mua trọn bộ kít cho dễ dàng trong công tác chuẩn bị nhé
D. Chuẩn bị dụng cụ cho quá trình chế tạo
- Máy hàn chì

2. Đồng hồ vạn năng

3. Cưa cầm tay

4. Súng bắn keo

5. Kiềm điện

6. Máy khoan

7. Oscilloscope

9. Vít Bake và vít dẹp

E. Tính năng của một số thiết bị quan trọng
Mạch khuếch đại LM324 Op-apms

Mạch khuếch đại LM324 Op-apms là mạch quan trọng trong hệ thống này, được sử dụng phổ biến nhất hiện nay trong việc khuếch đại tín hiệu
Cũng như tên gọi của nó mạch khuếch đại LM324 Op-apms được sử dụng để khuếch đại tín hiệu cảm biến từ, vì từ trường là loại khá khó nhận biết nên muốn Arduino nhận biết được từ trường thì chúng ta phải tăng độ nhạy của Arduino bằng cách thích hợp thêm mạch khuếch đại
Mạch khuếch đại này chuyển đổi ở đầu ra cảm biến từ vài mV thành vài trăm mV trong arduino là chuyện bình thường
Nên bạn thấy bộ khuếch đại này có quan trọng không, nếu không có bộ này thì chỉ cần một sai lệch nhỏ có thể gây ra lệch phần lơ lửng của thiết bị, gây hậu quả đỗ vỡ hết sức quan trọng
LM324 Op-apms có 4 bộ khuếch đại nhưng trong chế tạo này thì bạn chỉ cần sử dụng 2 bộ khuếch đại thôi, một là cho trục X, hai là cho trục Y
Module điều khiển động cơ L298 V2

Cũng như tên gọi của nó là module điều khiển động cơ, vậy điều khiển động cơ là điều khiển gì, L298N được sử dụng để điều khiển tốc độ động cơ và hướng của 2 động cơ DC hoặc là điều khiển một động cơ bước lưỡng cực
Điện áp giới hạn của động cơ mà module điều khiển L298 V2 này làm được là từ 5v-35v DC
Ngoài ra trên Modul điều khiển động cơ L298 cũng có thích hợp thêm bộ chuyển đổi ra 5v, ví dụ bạn có dòng điện cấp là 12v nhưng bạn vẫn có thể lấy ra được 5v
Để chế tạo nam cham bay lơ lửng , ta sử dụng Modul điều hiển động cơ L298 để điều khiển 2 cặp cuộn dây điện từ sử dụng đầu ra của modul là 5v để cấp nguồn cho Arduino
Sơ đồ modul :

- Out 2: cặp nam châm điện X
- Out 3: cặp nam châm điện Y
- 12v Input: Cung cấp điện đầu vào: dc 12v đầu vào
- GND: Nối đất
- 5v Output: 5v đầu ra cho Arduino và cảm biến từ
- EnA: Bật tín hiệu PWM cho Out 2
- In1: Bật tính hiệu out 2
- In2: Bật tính hiệu out 2
- In3: Bật tính hiệu out 3
- In4: Bật tính hiệu out 3
- EnB: Bật tín hiệu PWM cho Out 3
Cảm biến Từ SS495a

Cũng như tên gọi của nó, thiết bị SS495 a là thiết bị cảm biến từ trường, giúp hệ thống nhận biết từ trường và đưa về analog tạo dòng điện cho các cuộn cảm biết hút hay đẩy
Chú ý là cảm biến sẽ trả về tín hiệu dòng điện áp 250mV đến Vcc
F. Lắp cảm biến từ SS495a
Chúng ta lắp cảm biến từ SS495a như hình bên dưới

Sơ đồ mạch lắp ráp cảm biến từ SS495a

Chú ý là ta phải hàn giống như mạch như hình trên, nếu không muốn xảy ra lỗi ngoài ý muốn
G.Lắp ráp Mạch khuếch đại LM324 Op-apms
Chúng ta lắp ráp mạch khuếch đại như hình bên dưới

Chúng ta nối mạch khuếch đại y chang như sơ đồ mạch bên dưới đã được vẽ ra

Nhìn vào sơ đồ mạch quá dễ để nối mạch đúng không nào, nên phần này mình không cần phải nói nhiều hơn nữa
H. Gia công phần đế
Trong bài viết này tôi đã vẽ cho các bạn phần đế trong file Autocad
Vui lòng tải xuống file tại đây để gia công: Tải File gia công phần đế
Ta có thể gia công phần đế bằng các loại máy cắt CNC, laser để được sản phẩm như hình

K. Lắp ráp nam châm điện lên phần đế
Chúng ta lắp ráp nam châm điện như hình bên dưới

Chúng ta lắp nam châm điện vào 4 lỗ gần nhất trong phần đế, còn việc nối dây thì để từ từ, đừng quan tâm đến nhé
Sau đó chúng ta bắt đầu nối dây như hình bên dưới

Bởi vì các nam châm điện đối xứng nhau qua tâm phải đối cực với nhau
Nên bạn phải nối dây như sau:
+ Các dây bên trong nam châm điện được nối với nhau
+ Các dây ở bên ngoài của nam châm điện được nối với L298N.
L. Lắp ráp modul cảm biến từ trường và nam châm vĩnh cửu vào

Phần modul cảm biến chúng ta cố định tại tâm bằng silicon súng bắn keo , chú ý xịt silicon ở 2 mặt trước và sao để cho cố định modul cảm biến tốt nhé
Sau đó chúng ta láp nam châm vĩnh cữu vào
Vì chiều cao cuộn nam châm điện là 1mm nên chúng ta phải lấy 2 viên nam châm vĩnh cửu 1 viên có bề dày 3mm và 2 viên có bề dầy 4mm để lắp ghép cho cùng chiều cao với cuộn nam châm điện nhé
Và một điều chú ý nữa là các cực của nam châm vĩnh cửu ở 4 góc phải giống nhau nhé
M. Gắn giắc nguồn 12v vào L298 N

Chúng ta gắn giắc nguồn 12v vào đầu của L298N như hình, và đầu ra của nó là 5v sẽ được cắp cho Arduino nhé
Xem mạch lắp bên dưới đễ rõ hơn

N. Lắp ráp L298N với Arduino

Chúng ta nối các dây dẫn như trong hình giữa L298N và Arduino né
Bên dưới có mạch đễ bạn dễ dàng lắp ráp

Out 5V nối với VCC
GND nối với GND
EnA nối với 7
In1 nối với 6
In2 nối với 5
In3 nối với 4
In4 nối với 3
EnB nối với 2
M. Lắp ráp FTD 1232 với Arduino Pro Mini

Chúng ta tiếp tục đến bước lắp ráp cuối cùng là lắp ráp FTD1232 với Arduino Pro Mini
Bên dưới có sơ đồ lắp ráp, bạn hãy dựa vào sơ đồ này để nối mạch nhé

Tại sao chúng ta cần FTD1232 vì do Arduino Pro Mini không có cổng kết nối port nào cả, bắt buộc bạn phải thay thế chúng bằng kết nối rồi nhé
P. Setting giá trị điểm đặt chuẩn cho phần lơ lửng
Bỏ code bên dưới này vào Arduino
int Setpoint_X, Setpoint_Y;
void setup() {
Serial.begin(9600);
Serial.print("Hello, This is program to get X Y setpoint value!\r\n");
}
void loop() {
// read the value from the sensor:
Serial.print("Setpoint_X: ");
Serial.print(analogRead(A1));
Serial.print(" ");
Serial.print("Setpoint_Y: ");
Serial.print(analogRead(A0));
Serial.print("\r\n");
delay(100);
}
Mục tiêu của code này là đọc các giá trị của cảm biến từ trường và đưa nó về máy tính , mở cổng COM để xem nhé
Sử dụng máy đo Osilloscope để đọc giá trị cảm biến

Khi bạn thấy giá trị 560, và đầu ra của cảm biến là 2.5v thì đó là giá trị tốt nhất
Sau khi thiết lập điểm đặt, đặt nam châm lơ lững phía trên phần đế và lắc nó để xem thay đổi điểm đặt trên màn hình.
Mẹo: Đánh dấu cặp nam châm điện và chiết áp tương ứng trong trục X và Y để bạn có thể dễ dàng sửa chúng sau này.
Q. Gắn code cho arduino pro mini
Bỏ code bên dưới vào arduino
#include <PID_v1.h>
#define IN1 4
#define IN2 3
#define IN3 7
#define IN4 8
#define ENA 6
#define ENB 5
#define BL 2
double Setpoint_X, Input_X, Output_X,X_plus;
double p_X = 1,i_X = 0,d_X = 0.01;
double Setpoint_Y, Input_Y, Output_Y,Y_plus;
double p_Y = 1,i_Y = 0,d_Y = 0.01;
int i,on_put=1;
unsigned long time;
PID PID_X(&Input_X, &Output_X, &Setpoint_X,p_X,i_X,d_X, DIRECT);
PID PID_Y(&Input_Y, &Output_Y, &Setpoint_Y,p_Y,i_Y,d_Y, DIRECT);
char inByte='9',nullByte,run_flag,run_dirict;
float go_step;
void turn_X(int a)
{
if(a>=0)
{
digitalWrite(IN1,1);
digitalWrite(IN2,0);
analogWrite(ENA,a);
}
else
{
a=-a;
digitalWrite(IN1,0);
digitalWrite(IN2,1);
analogWrite(ENA,a);
}
}
void turn_Y(int a)
{
if(a>=0)
{
digitalWrite(IN3,0);
digitalWrite(IN4,1);
analogWrite(ENB,a);
}
else
{
a=-a;
digitalWrite(IN3,1);
digitalWrite(IN4,0);
analogWrite(ENB,a);
}
}
void setup()
{
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
pinMode(ENA,OUTPUT);
pinMode(ENB,OUTPUT);
pinMode(BL,OUTPUT);
digitalWrite(IN1,0);
digitalWrite(IN2,0);
digitalWrite(IN3,0);
digitalWrite(IN4,0);
analogWrite(ENA,0);
analogWrite(ENB,0);
Setpoint_X = 560;//560;
Setpoint_Y = 560;//560;
PID_X.SetTunings(p_X,i_X,d_X);
PID_Y.SetTunings(p_Y,i_Y,d_Y);
PID_X.SetOutputLimits(-255,255);
PID_Y.SetOutputLimits(-255,255);
PID_X.SetSampleTime(5);
PID_Y.SetSampleTime(5);
PID_X.SetMode(AUTOMATIC);
PID_Y.SetMode(AUTOMATIC);
}
void loop()
{
Input_X = analogRead(A1);
Input_Y = analogRead(A0);
PID_X.Compute();
PID_Y.Compute();
turn_X(Output_X);
turn_Y(Output_Y);
}
Sau khi tải chương trình chính bên trên vào arduino xem như là hoàn tất, chúng ta có thể điều chỉnh thiết bị chiếc áp để canh chỉnh cho phần lơ lững ở giữa thiết bị theo giác quan
X. Kết thúc
Cuối cùng thì chúng ta đã chế tạo thành công nam châm bay lơ lửng rồi nhé, còn về việc áp dụng sản phẩm vào đâu thì tùy bạn quyết định, có thể để trưng bày sản phẩm hoặc là làm chậu cây thông minh, chậu cây bay lơ lửng bạn nhé, chúc bạn thành công mỹ mãn nhé
Cập nhật lúc 21:14 – 16/10/2019
Chưa hiểu mạch khêch đại đâu vào đâu ạ